



Động Cơ DC Servo Giảm Tốc GA25
Thương hiệu : Khác
220,000đ
Động cơ DC Servo giảm tốc GA25 V1 thường được sử dụng trong các ứng dụng cần xác định tốc độ, vị trí, chiều quay của động cơ DC: Robot mê cung, robot xe hai bánh tự cân bằng,...
Động cơ DC Servo thực tế là động cơ DC thường có gắn thêm phần Encoder để có thể trả xung về vi điều khiển giúp xác định vị trí, vận tốc,... Về cách điều khiển thì động cơ DC Servo sử dụng Driver như động cơ DC thường để điều khiển công suất động cơ, tốc độ và đảo chiều: L298, L293,..., chỉ có điểm khác biệt là có thêm phần encoder để có thể hồi tiếp (feedback) xung về Vi điều khiển, từ đó vi điều khiển tác động lại động cơ qua mạch công suất sử dụng các thuật toán điều khiển như PID,... để điều khiển tốc độ, vị trí,...




Động cơ DC Servo giảm tốc GA25 V1 thường được sử dụng trong các ứng dụng cần xác định tốc độ, vị trí, chiều quay của động cơ DC: Robot mê cung, robot xe hai bánh tự cân bằng,...
Động cơ DC Servo thực tế là động cơ DC thường có gắn thêm phần Encoder để có thể trả xung về vi điều khiển giúp xác định vị trí, vận tốc,... Về cách điều khiển thì động cơ DC Servo sử dụng Driver như động cơ DC thường để điều khiển công suất động cơ, tốc độ và đảo chiều: L298, L293,..., chỉ có điểm khác biệt là có thêm phần encoder để có thể hồi tiếp (feedback) xung về Vi điều khiển, từ đó vi điều khiển tác động lại động cơ qua mạch công suất sử dụng các thuật toán điều khiển như PID,... để điều khiển tốc độ, vị trí,...
Thông số kỹ thuật:
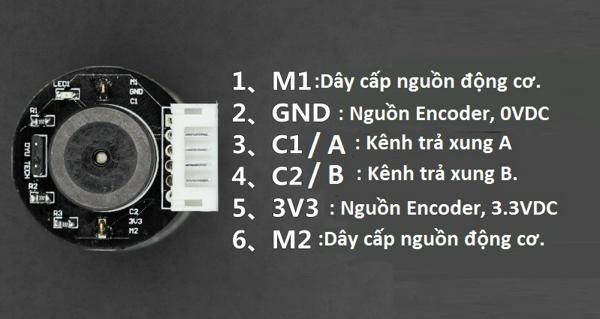
- Điện áp cấp cho động cơ hoạt động : 3 - 12VDC
- Điện áp cấp cho Encoder hoạt động: 3.3VDC
- Đĩa Encoder 11 xung, hai kênh A-B.
- Tỷ số truyền khi qua hộp giảm tốc: 1:34
- Số xung khi qua hộp giảm tốc: 374 xung.
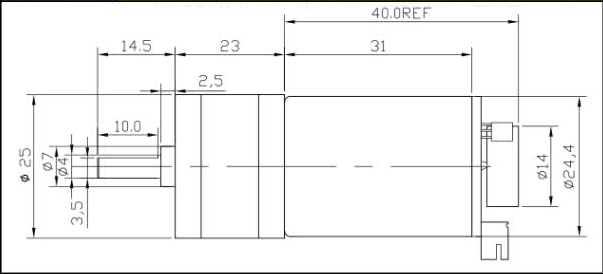
- Đường kính động cơ: 25mm.
- Đường kính trục : 4mm
- Tốc độ không tải : 320 rpm
- Dòng không tải : 80mA
- Tốc độ có tải : 284 rpm
- Dòng khi có tải : 600mA
- Mômen : 1.88 kgf.cm
- Công suất định mức : 13.2W
- Dòng khi động cơ bị giữ : 2.29A
- Mô men khi bị giữ : 7.96 kgf.cm
SƠ ĐỒ Động cơ DC giảm tốc GA25
Động cơ DC Servo giảm tốc GA25 V1 thường được sử dụng trong các ứng dụng cần xác định tốc độ, vị trí, chiều quay của động cơ DC: Robot mê cung, robot xe hai bánh tự cân bằng,...
Động cơ DC Servo thực tế là động cơ DC thường có gắn thêm phần Encoder để có thể trả xung về vi điều khiển giúp xác định vị trí, vận tốc,... Về cách điều khiển thì động cơ DC Servo sử dụng Driver như động cơ DC thường để điều khiển công suất động cơ, tốc độ và đảo chiều: L298, L293,..., chỉ có điểm khác biệt là có thêm phần encoder để có thể hồi tiếp (feedback) xung về Vi điều khiển, từ đó vi điều khiển tác động lại động cơ qua mạch công suất sử dụng các thuật toán điều khiển như PID,... để điều khiển tốc độ, vị trí,...










